
Аэротакси… часть четвертая. Квадрокоптеры, маленькие размышления о будущем.
Аэродинамика этих аппаратов.
Эти аппараты стремятся сделать компактными, но это создаёт огромные проблемы:
- размеры кабин определяются размерами пассажиров и в целом получаются не самой благоприятной формы, что отрицательно влияет на скоростные, энергетические и экономические качества аппаратов. Конечно, можно любому коробку придать аэродинамически совершенную форму, но…. Это значит, что увеличатся размеры корпуса, его вес, усложнится и станет дороже производство, появятся и другие чисто эксплуатационные проблемы, например – удобство посадки и высадки пассажира. А значит и здесь нужен компромисс.
- аэродинамическая компоновка в совокупности с высокоэнергетическими струями несущих винтов при взаимодействии с внешними факторами (ветер, порывы ветра, воздушные ямы) дают мало предсказуемую динамику полёта таких летательных аппаратов, что требует их оснащение системами автоматического управления с элементами искусственного интеллекта. Увы, чистого программного кода может оказаться недостаточно, а «скачивать» обновления в критической ситуации будет некогда.
- современные несущие винты квадрокоптеров, как «носитель», имеют значительно меньшую эффективность, чем винты вертолётов, автожиров и тем более крыла самолёта. Маленькое отступление: на одну лошадиную силу, весьма совершенного Ми-26, приходится менее 2,5 килограмм веса вертолёта. У Ми-2 этот показатель был 4,6 килограмма. У самолётов получше, например, у старенького извозчика Ан-2 – 5, 5 кг/л.с., у Як-12 – 7,4 кг/л.с., а у легендарного По-2 вообще более 7,7 кг/л.с.. Вспомним, что у вертолета Ботезата на одну лошадиную силу приходится более 10 килограмма веса вертолёта. Итак, современность требует энергорасточительности, повышаются требования к мощности силовой установки, а это в свою очередь приводит к резкому снижению продолжительности и дальность полёта. Как компромиссное решение некоторые разработчики используют компоновки с крыльевыми поверхностями, которые должны разгрузить несущие винты и повысить экономичность такого транспортного средства. Но это, как минимум, увеличивает габаритные размеры и усложняет пилотирование, особенно на переходных режимах и в городских условиях, более того, сделает эти аппараты неэффективными и чрезвычайно опасными при маневрировании среди «высоток» (по причине хаотичных воздушных потоков). Отметим, что схемы с неподвижным крылом при вертикальном взлёте снижают эффективность винтов, схемы с поворотным крылом сложны в управлении на переходных режимах, особенно в ветряных условиях. Возможно, идеальным компромиссом являются поворотные винтомоторные установки с кольцами, которые в горизонтальном полёте будут работать как крыло.
Энергетика таких аппаратов.
Если «вертолет Ботезата» имел винты создающую подъёмную силу, то современные несущие винты квадрокоптеров совсем не «несут», они вернее тянущие, за счет отбрасываемой ими массы воздуха, то есть реализуют реактивный принцип движителя. Это вовсе не новый принцип движителя и он объективно считаются энергозатратным и неэффективными. Очень маленький пример – чем меньше число лопастей, тем теоретически выше КПД винта, а его тяга зависит в пятой степени от диаметра.
Современное развитие технологии позволяют исключить сложные и тяжёлые трансмиссии привода винтов, применив мощные и компактные электромоторы, например - мощность 20 лошадиных сил при массе 3 килограмма! Надежность их не безупречна, а что будет при выходе из строя одного-двух двигателей, а если будет короткое замыкание «электрической трансмиссии»? А значит, система должна иметь значительную избыточность по мощности и быстрое автоматическое реагирование, что, в свою очередь, принесёт новые проблемы.
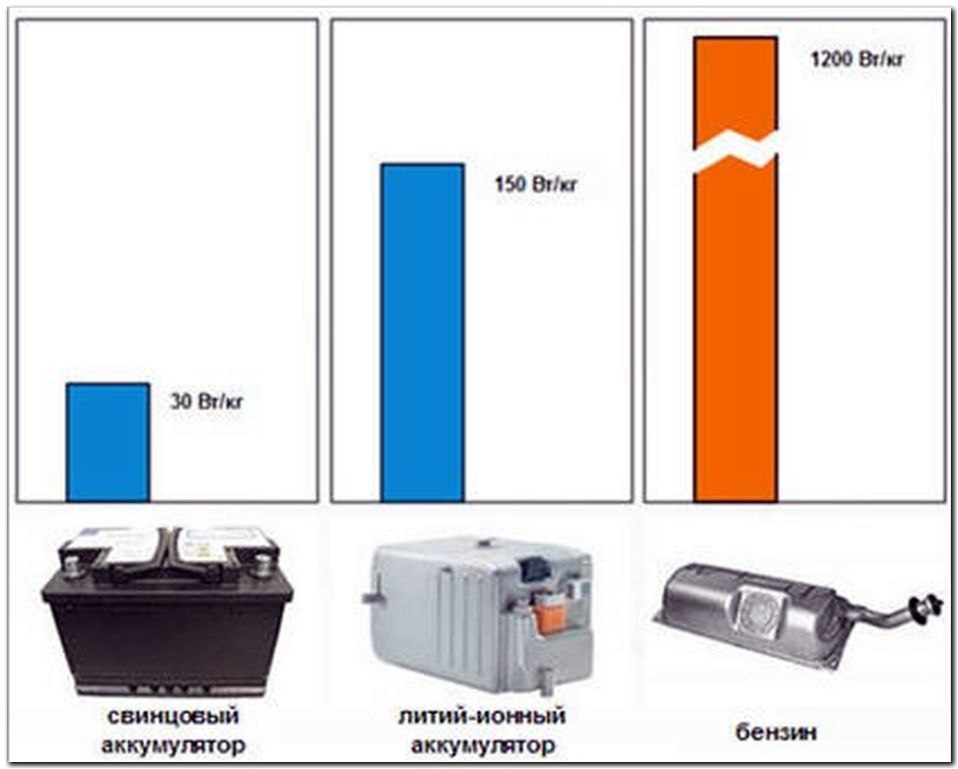
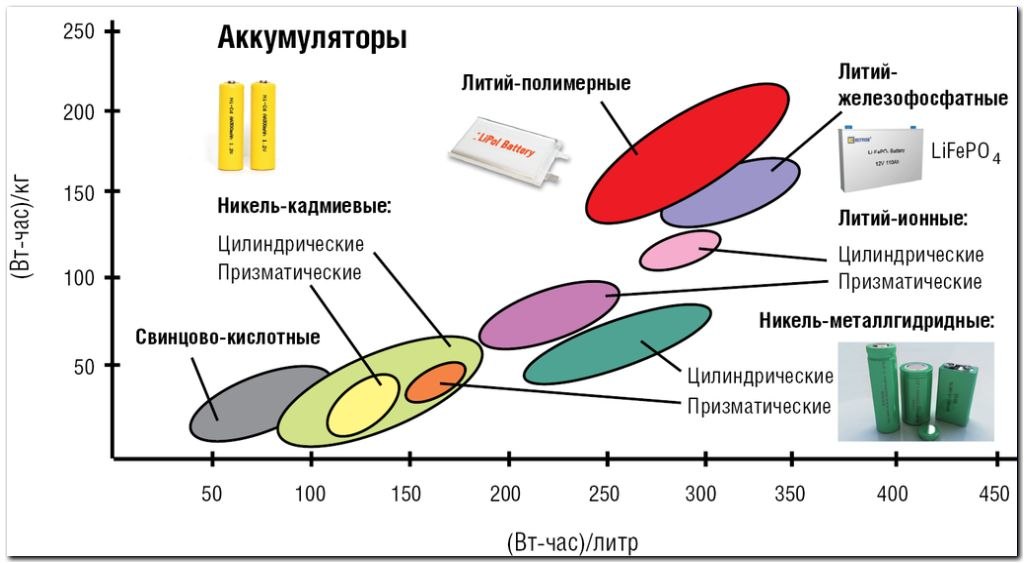
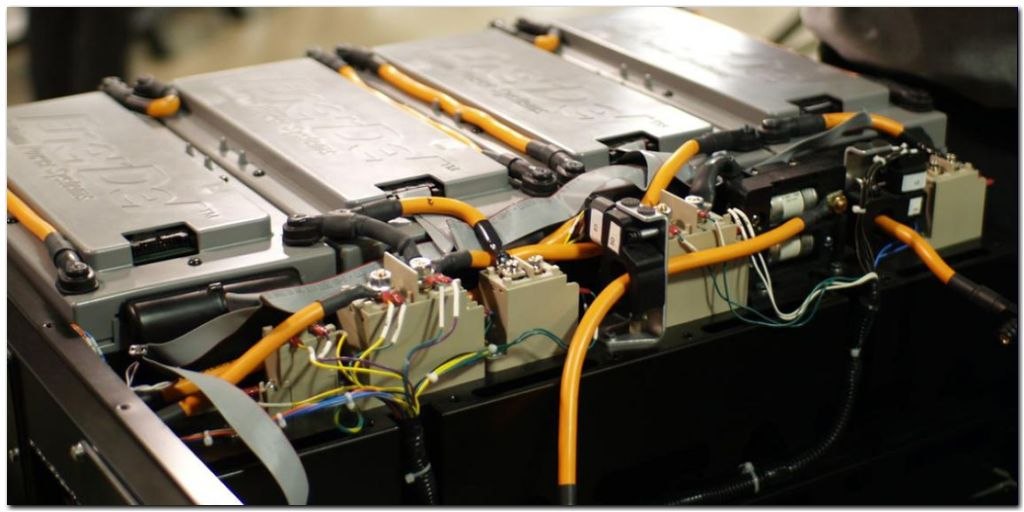
Другая проблема, для обеспечения энергетической возможности полёта необходимы ёмкие и легкие источники электропитания. Химические аккумуляторы, удовлетворяющие этим требования, очень дороги, капризны и небезопасны. Они склонны к потере ёмкости, саморазряду, зависимы от температуры окружающей среды, ограниченный и мало предсказуемый ресурс. Хотя конечно есть разработки весьма перспективных литий-серных, литий-титанатовых, литий-воздушных батареи и некоторых других. Но это пока далёкая перспектива. Возможно, на текущем технологическом уровне их можно и нужно использовать аварийным источником электроэнергии, но вовсе не основным. А что тогда? Напрашиваются более экзотические схемы, самыми простыми из которых является генераторная установка с приводом от обычного двигателя внутреннего сгорания или от супермаховика. Супермаховик интересен ещё и тем, что может придать «устойчивость» летательному аппарату (явление прецессии), но это как говорится «палка о двух концах».
Безопасность этих аппаратов.
Очень, очень не высока. Самое простое, это сильная зависимость от климатических и погодных условий, и это не только зависимость от «розы» ветров, но и многих других факторов.
Например:
- представьте последствия обледенения винтомоторных установок в полёте. Это стопроцентная потеря устойчивости и управляемости;
- винты являются высоконагруженными элементами. Представьте последствия разрушения винта, особенно если пассажирская кабина находится в плоскости вращения винта. Впору кабину бронировать…. Не случайно в большой авиации никогда экипаж и пассажиры не размещались в плоскости вращения воздушных винтов.
- можно ли считать, для автоматического управления аппаратом, достаточной точность позиционирования: местоположение объекта — 5+7 м, скорость — 0.05+0.15 м/с, времени — 5+15 нс. Именно эту точность обеспечивает гражданская версия GPS системы, а доступные возможности отечественной системы ГЛОНАСС скромнее. Официально, «открытые» приемники ГЛОНАСС позволяют определить горизонтальные (с точностью 50-70 м) и вертикальные координаты (70 м), вектор скорости (с точностью 0,15 м/сек), время с точностью 0,7 мкс..
Поделитесь записью с друзьями











Посмотреть ещё 7 фотографий
Австралиец Джаррод Аллен воссоздает фотографии девушек залитые в инстаграм.
Сайт знакомств Междуреченск с телефонами и фото без регистрации бесплатно
Сайт знакомств Междуреченск с мужчинами с номерами телефонов без регистрации бесплатно
Сайт знакомств Междуреченск с женщинами кому за 30
Сайт знакомств Междуреченск с номерами телефонов бесплатно
Сайт знакомств Междуреченск для брака бесплатно
Сайт знакомств онлайн Междуреченск бесплатно
Секс Междуреченск без регистрации
© 2008‒2024 Социально‐развлекательная сеть «Фотострана». Пользователей: 27 254 507 человек
Следующая запись: День рожденья у него... В принципе не в восторге, но он всё же достоин, чтобы о нём сказали. Итак, ...
Лучшие публикации